

الحركة التلقائية - المهارات الرقمية - أول متوسط
الفصل الدراسي الأول
الوحدة الأولى: تعلم الأساسيات
الوحدة الثانية: معالجة النصوص المتقدمة
الوحدة الثالثة: مقدمة في البرمجة
الفصل الدراسي الثاني
الوحدة الأولى: الاتصال بالإنترنت
الوحدة الثانية: التنسيق المتقدم والدوال
الوحدة الثالثة: البرمجة مع بايثون
الفصل الدراسي الثالث
الوحدة الأولى: الدوال المنطقية والمخططات
الوحدة الثانية: عرض الأفكار من خلال العرض التقديمي
الوحدة الثالثة: برمجة الروبوت الافتراضي
- مهارات رقمية 00:15
 01:07
01:07
 1
1


رابط الدرس الرقمي www.ien.edu.sa الدرس الثالث الحركة التلقائية يوجد في فيكس كود في آر VEXcode VR) عدة مستشعرات يمكن استخدامها للتحكم في حركة الروبوت المختلفة. بشكل عام، تستخدم المستشعرات لاكتشاف التغيرات في البيئة المحيطة ، فعند ذهابك لمركز تجاري مثلا، تفتح بعض الأبواب بصورة تلقائية لاحتوائها على مستشعر للأشعة تحت الحمراء يمكنه اكتشاف التغير في درجة الحرارة. ستتعرف في هذا الدرس على كيفية استخدام مستشعر الجيرسكوب لتحريك روبوتك في ساحة اللعب. مستشعر الجيرسكوب يوجد مستشعر الجيرسكوب (Gyro sensor في الجزء الخلفي من الروبوت. يتم تحديد موضع الروبوت الافتراضي وفق مركزه للانعطاف وهو موقع قلم الروبوت أيضًا. يتم استخدام مستشعر الجيرسكوب للملاحة، لأنه يُمكّن من تحديد اتجاه الروبوت ويقيس سرعة واتجاه انعطاف الروبوت. يُمكّن مستشعر الجيرسكوب الروبوت من القيادة بشكل مستقيم والانعطاف بصورة صحيحة. لاحظ أن مستشعر الجيرسكوب يمكنه اكتشاف ما إذا كانت الحركة باتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة، بالإضافة إلى تحديد تغير موقع الروبوت أثناء حركته في ساحة اللعب. 0° 270° 90° хал X3 180° يمكن لمستشعر الجيرسكوب تحديد الاتجاه ومسافة انعطاف الروبوت عن نقطة البداية. وزارة التعليم Ministry of Education 2024-1446 338

المستشعرات

مستشعر الجيرسكوب
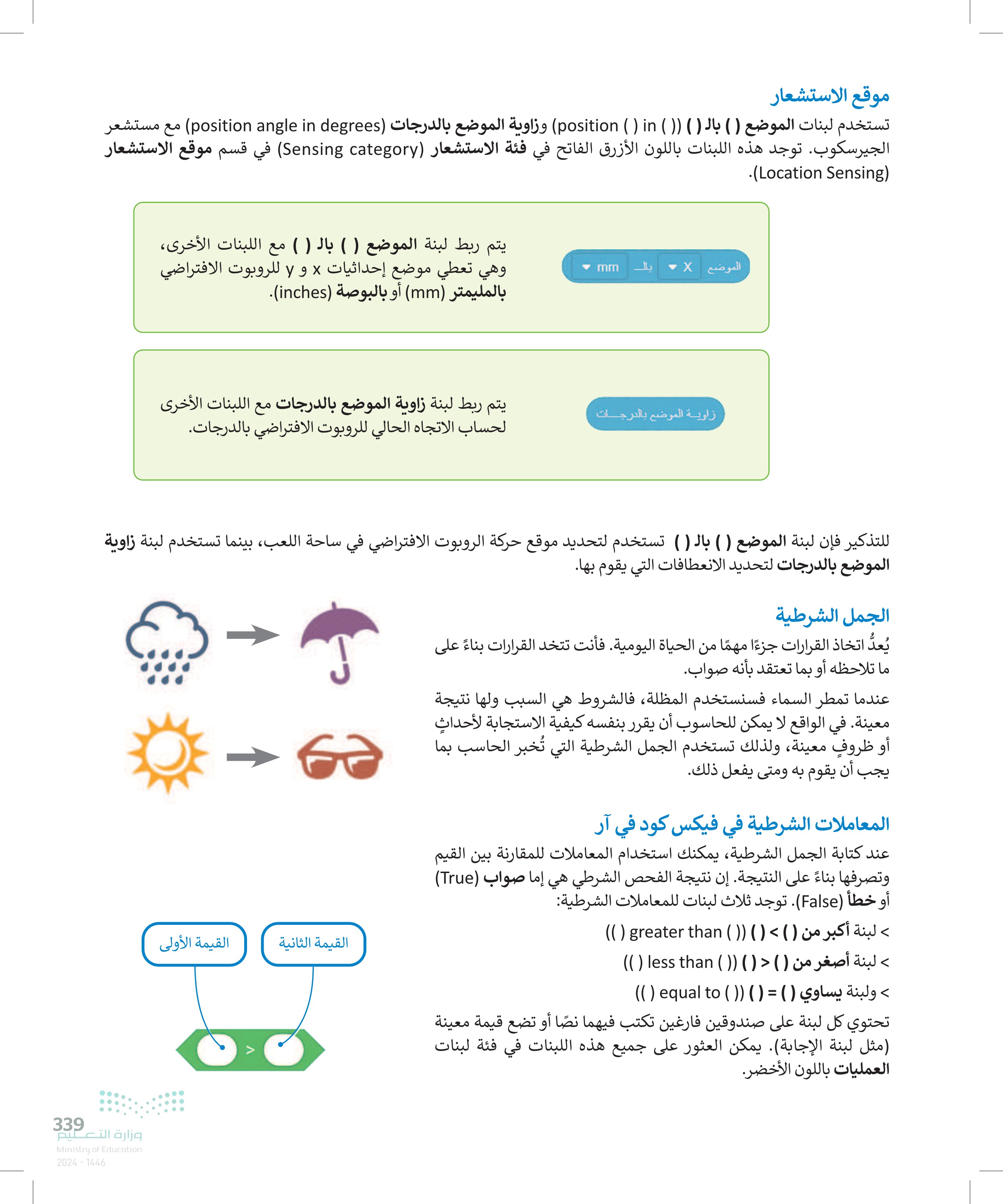
موقع الاستشعار تستخدم لبنات الموضع ( ) بال )) ((( position )) in) وزاوية الموضع بالدرجات position angle in degrees) مع مستشعر الجيرسكوب. توجد هذه اللبنات باللون الأزرق الفاتح في فئة الاستشعار Sensing category في قسم موقع الاستشعار .(Location Sensing) الموضع X mm يتم ربط لبنة الموضع ( ) بالـ (( مع اللبنات الأخرى، وهي تعطي موضع إحداثيات x و y للروبوت الافتراضي بالمليمتر (mm) أو بالبوصة (inches). زاوية الموضع بالدرجات يتم ربط لبنة زاوية الموضع بالدرجات مع اللبنات الأخرى لحساب الاتجاه الحالي للروبوت الافتراضي بالدرجات. للتذكير فإن لبنة الموضع ( ) بالـ ( ) تستخدم لتحديد موقع حركة الروبوت الافتراضي في ساحة اللعب، بينما تستخدم لبنة زاوية الموضع بالدرجات لتحديد الانعطافات التي يقوم بها. الجمل الشرطية يُعدُّ اتخاذ القرارات جزءًا مهما من الحياة اليومية. فأنت تتخد القرارات بناءً على ما تلاحظه أو بما تعتقد بأنه صواب. عندما تمطر السماء فسنستخدم المظلة، فالشروط هي السبب ولها نتيجة معينة. في الواقع لا يمكن للحاسوب أن يقرر بنفسه كيفية الاستجابة لأحداث أو ظروف معينة، ولذلك تستخدم الجمل الشرطية التي تُخبر الحاسب بما يجب أن يقوم به ومتى يفعل ذلك. المعاملات الشرطية في فيكس كود في آر عند كتابة الجمل الشرطية، يمكنك استخدام المعاملات للمقارنة بين القيم وتصرفها بناءً على النتيجة. إن نتيجة الفحص الشرطي هي إما صواب (True) أو خطأ (False). توجد ثلاث لبنات للمعاملات الشرطية لبنة أكبر من () < )) (( ) greater than ( )) لبنة أصغر من () < ( ) (() less than ( )) > ولبنة يساوي ( ) = ( ) ( ) equal to ( )) تحتوي كل لبنة على صندوقين فارغين تكتب فيهما نصًا أو تضع قيمة معينة (مثل لبنة الإجابة. يمكن العثور على جميع هذه اللبنات في فئة لبنات العمليات باللون الأخضر. 67 B القيمة الثانية القيمة الأولى 339 وزارة التعليم Ministry of Education 2024-1446
استشعار الموقع
الجمل الشرطية
المعاملات الشرطية في فيكس كود في آر
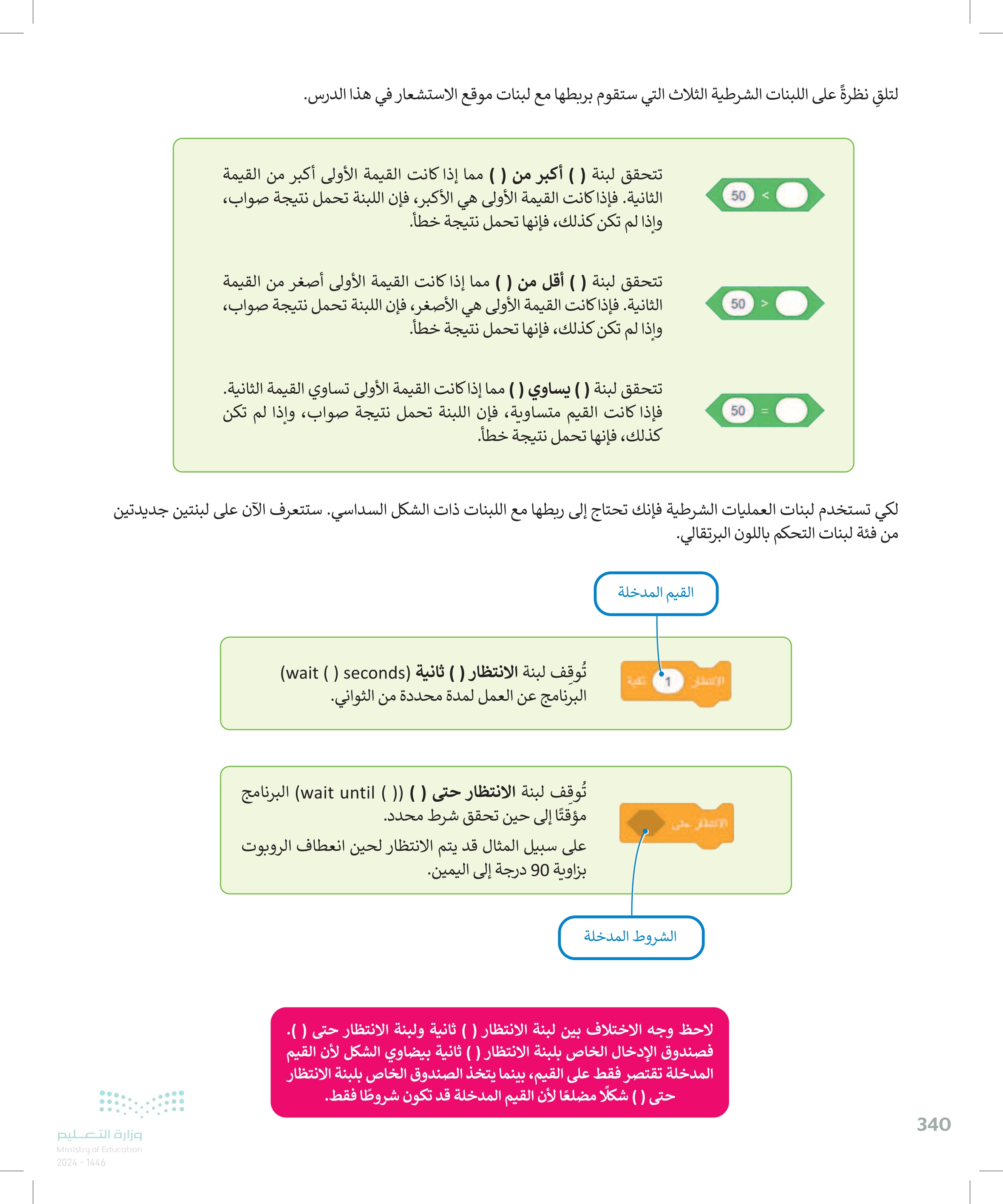
340 لتلق نظرةً على اللبنات الشرطية الثلاث التي ستقوم بربطها مع لبنات موقع الاستشعار في هذا الدرس. 50 50 50 تتحقق لبنة ( ) أكبر من ( ) مما إذا كانت القيمة الأولى أكبر من القيمة الثانية. فإذا كانت القيمة الأولى هي الأكبر، فإن اللبنة تحمل نتيجة صواب، وإذا لم تكن كذلك، فإنها تحمل نتيجة خطأ. تتحقق لبنة ) ( أقل من ( ) مما إذا كانت القيمة الأولى أصغر من القيمة الثانية. فإذا كانت القيمة الأولى هي الأصغر، فإن اللبنة تحمل نتيجة صواب، وإذا لم تكن كذلك، فإنها تحمل نتيجة خطأ. تتحقق لبنة (( يساوي ( ) مما إذا كانت القيمة الأولى تساوي القيمة الثانية. فإذا كانت القيم متساوية، فإن اللبنة تحمل نتيجة صواب، وإذا لم تكن كذلك، فإنها تحمل نتيجة خطأ. لكي تستخدم لبنات العمليات الشرطية فإنك تحتاج إلى ربطها مع اللبنات ذات الشكل السداسي. ستتعرف الآن على لبنتين جديدتين من فئة لبنات التحكم باللون البرتقالي الانتظار القيم المدخلة الانتظار على الشروط المدخلة تُوقِف لبنة الانتظار ( ) ثانية (wait ( ) seconds) البرنامج عن العمل لمدة محددة من الثواني. توقف لبنة الانتظار حتى ) ( )( ) wait until البرنامج مؤقتًا إلى حين تحقق شرط محدد. على سبيل المثال قد يتم الانتظار لحين انعطاف الروبوت بزاوية 90 درجة إلى اليمين. لاحظ وجه الاختلاف بين لبنة الانتظار ( ) ثانية ولبنة الانتظار حتى ( ). فصندوق الإدخال الخاص بلبنة الانتظار ( ) ثانية بيضاوي الشكل لأن القيم المدخلة تقتصر فقط على القيم، بينما يتخذ الصندوق الخاص بلبنة الانتظار حتى ( ) شكلًا مضلعًا لأن القيم المدخلة قد تكون شروطا فقط. وزارة التعليم Ministry of Education 2024-1446
لنلق نظرة على اللبنات الشرطية الثلاث التي ستقوم بربطها مع لبنات استشعار الموقع في هذا الدرس
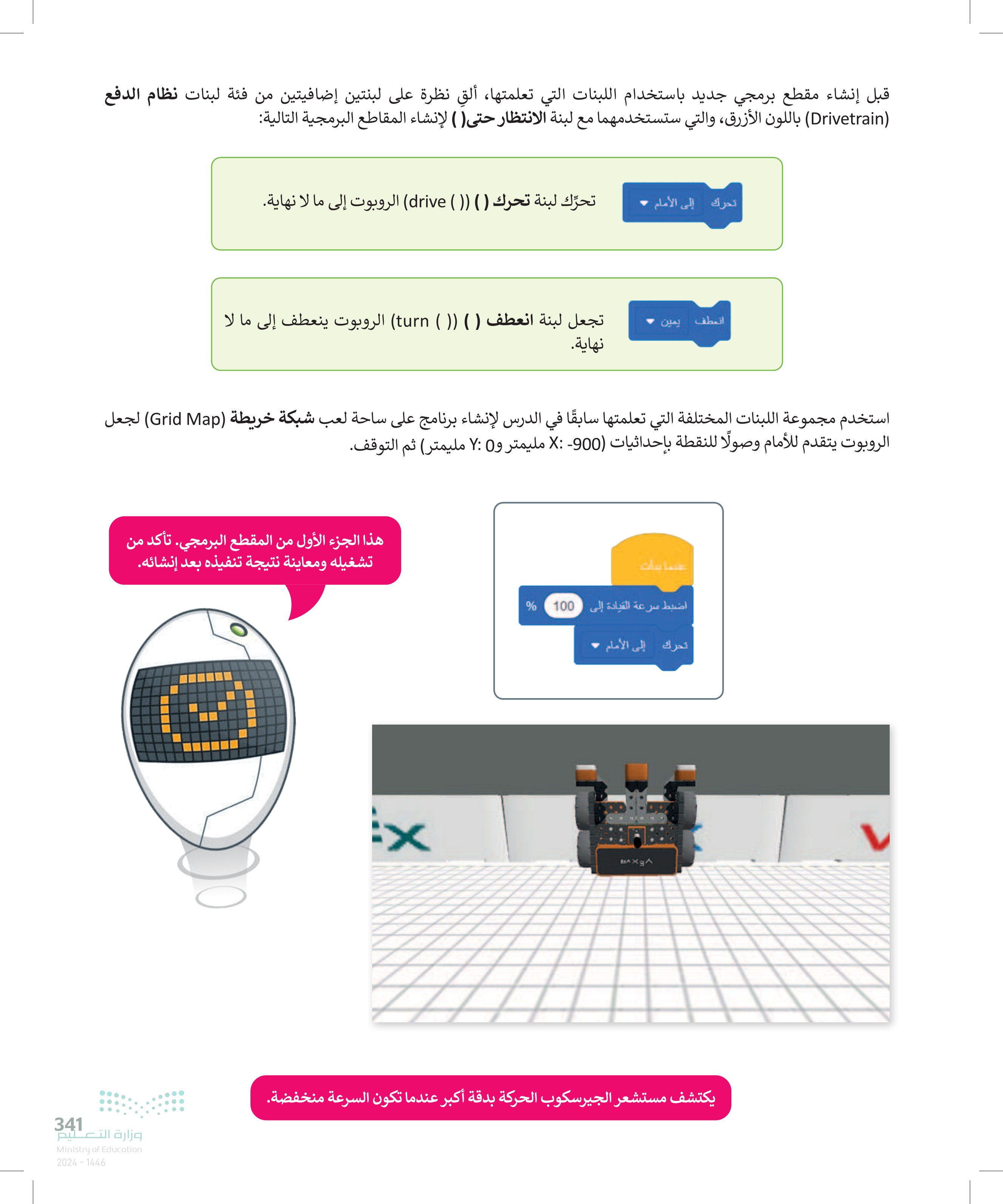
قبل إنشاء مقطع برمجي جديد باستخدام اللبنات التي تعلمتها ألقِ نظرة على لبنتين إضافيتين من فئة لبنات نظام الدفع (Drivetrain) باللون الأزرق، والتي ستستخدمهما مع لبنة الانتظار حتى (( لإنشاء المقاطع البرمجية التالية: تحرك إلى الأمام تحرّك لبنة تحرك )) ((( drive) الروبوت إلى ما لا نهاية. انعطف يمين تجعل لبنة انعطف ( ( (( ( (turn) الروبوت ينعطف إلى ما لا نهاية. استخدم مجموعة اللبنات المختلفة التي تعلمتها سابقًا في الدرس لإنشاء برنامج على ساحة لعب شبكة خريطة Grid Map لجعل الروبوت يتقدم للأمام وصولًا للنقطة بإحداثيات (900) :: مليمتر و 0 : مليمتر) ثم التوقف. Y: اضبط سرعة القيادة إلى 100 % تحرك إلى الأمام هذا الجزء الأول من المقطع البرمجي. تأكد من تشغيله ومعاينة نتيجة تنفيذه بعد إنشائه. Ex يكتشف مستشعر الجيرسكوب الحركة بدقة أكبر عندما تكون السرعة منخفضة. 341 وزارة التعليم Ministry of Education 2024-1446
قبل إنشاء برنامج جديد باستخدام اللبنات اللي تعلمتها ألق نظرة على لبنتين إضافيتين من فئة لبنات نظام الدفع
استخدم مجموعة اللبنات المختلفة التي تعلمتها سابقا في الدرس لإنشاء برنامج على ساحة لعب شبكة خريطة
342 لكي يصل الروبوت إلى النقطة بإحداثيات (900- : : مليمتر و 0 :: مليمتر)، يتعين عليك الآتي: الانتقال إلى النقطة (900- :: مليمتر و 0 Y: مليمتر > من فئة التحكم (Control) ، أضف لبنة الانتظار حتى )) (( ) wait until). 0 من فئة العمليات (Operators) ، أضف لبنة ) ( أكبر من )) ((( greater than ( )) @ وغيّر القيمة الثانية إلى 1 2 > من فئة الاستشعار (Sensing) ، أضف لبنة الموضع ( ) بالـ () () (position ( ) in) إلى الجزء الأول من لبنة ) ( أكبر من (( ((( greater than ( )) . 0 > اضغط على القائمة المنسدلة واختر ٧. 5 > من فئة نظام الدفع (Drive train)، أضف لبنة أوقف القيادة stop driving) نظام الدفع مغناطيس العرض 1 عمانيك اضبط سرعة القيادة إلى 100 % اضبط سرعة القيادة إلى 100 % تحرك إلى الأمام تحرك إلى الأمام 4 <+ الأستار على الموضع Y بال الانتظار على 50 6 2 أوقف القيادة X 5 الاستشعار العمليات -1 mm 3 قبل تشغيل المقطع البرمجي، انتقل إلى مجموعات فئة الاستشعار ذات اللون الأزرق الفاتح في قسم موقع الاستشعار حدد المربع الموجود على يسار لبنة الموضع ( ) بالـ ( ) السابقة. تضيف أو تزيل مربعات الاختيار هذه بيانات المستشعرات أو المتغيرات إلى وحدة تحكم المراقبة افتح نافذة المراقبة نظرًا لأنك حددت الخيار الخاص بالموضع في لبنة الموضع () بالـ ( ) . فسيتم عرض موضع الروبوت في وحدة تحكم موقع الاستشعار المراقبة. AV أجهزة الاستشعار -900 -900 بالمللي متر X الموضع بالمللي متر ۷ الموضع الموضع X mm وزارة التعليم Ministry of Education 2024-1446
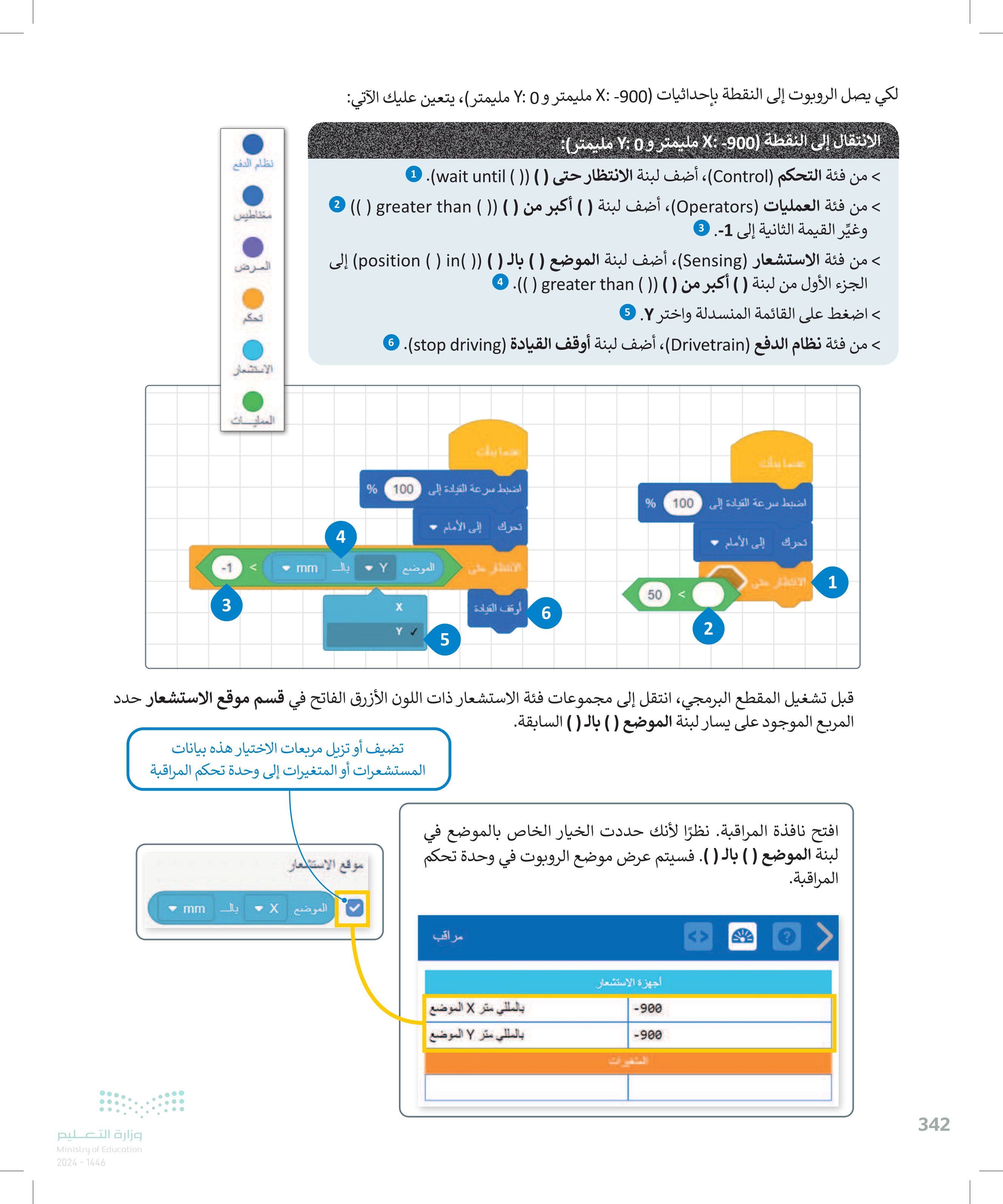
لكي يصل الروبوت إلى النقطة بإحداثيات (-900...)
قد تلاحظ في المقطع البرمجي السابق الذي أنشأته أن إحداثيات الموقع المعروض لن تكون بالتحديد (900) : مليمتر و 0 : مليمتر)، يرجع هذا إلى أن تسلسل تنفيذ المقطع البرمجي يستغرق بعض الوقت أثناء معالجته لكل لبنة برمجية. شَغل مقطعك البرمجي مرةً أخرى بعد تغيير التسارع إلى 10 هل حصلت على نتيجة أفضل؟ الوصول إلى مركز المحاور بناءً على المقطع البرمجي السابق، أجر بعض التغييرات لإنشاء المقطع البرمجي أدناه. سيصل الروبوت إلى إحداثيات - : مليمتر و 0 : مليمتر) ثم سيتوقف. لا تنس تحديد المربعات الموجودة على يسار لبنتي الموضع ( ) بال ( ) وزاوية الموضع بالدرجات. خفض سرعة المنعطفات لتكون أكثر دقة اضبط سرعة القيادة إلى 10 % إضبط سرعة الإنعطاف إلى 10 % تحرك إلى الأمام الانتظار على الموضع Y انعطف يمين حدد خانة الاختيار لرؤية بيانات جهاز الاستشعار في وحدة التحكم في المراقبة -1 mm الانتصار على زاوية الموضع بالدرجات - 89 تحرك إلى الأمام الانتظار حالي الموضع X أوقف القيادة إيقاف الحركة (القيادة) -1 mm نصيحة ذكية AV ? موقع الاستشعار الموضع X زاوية الموضع بالدرجات mm أجهزة الاستشعار 0 زاوية الموقف في درجـ لا تنس أن نافذة التحكم تعرض جميع قيم المستشعر الخاصة بالروبوت الافتراضي وهذا يفيد عند الحاجة للرجوع إليه أثناء المشروع أو عند الانتهاء منه. 343 وزارة التعليم Ministry of Education 2024-1446
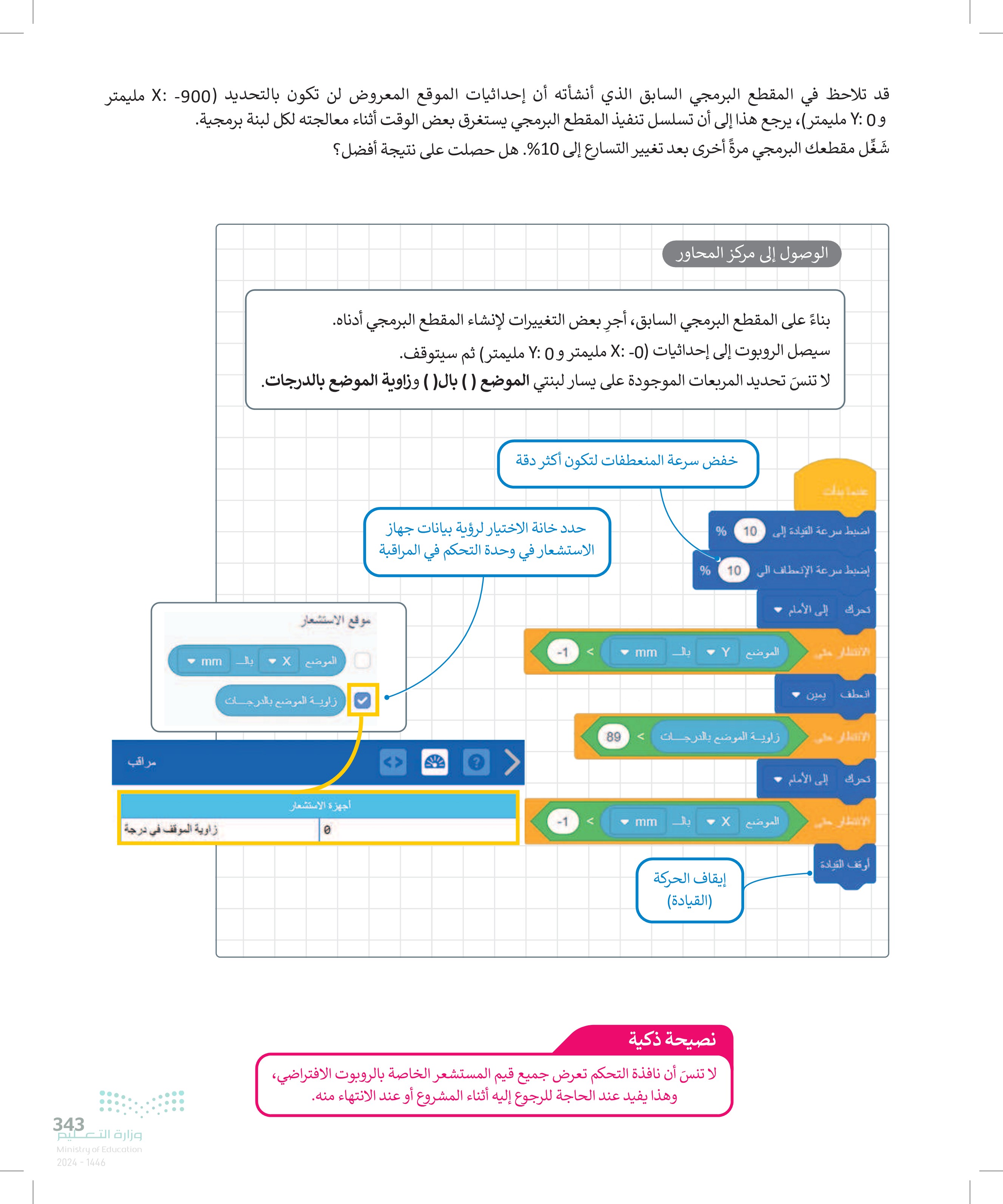
شغل برنامجك مرة أخرى بعد تغيير التسارع إلى 10% هل حصلت على نتيجة أفضل؟
لا تنس أن نافذة التحكم تعرض جميع قيم المستشعر الخاصة بالروبوت
344 كيف تعمل لبنة إذا () ثم؟ تسمح الجمل الشرطية بالتحكم فيما يفعله برنامج الحاسب، وتجعل الحاسب يقوم بإجراءات مختلفة بناءً على العبارات المنطقية. ينفذ البرنامج قسمًا معينًا من التعليمات البرمجية بناءً على ما إذا كان الشرط صواب أو خطأ. من أكثر الطرق شيوعًا لاتخاذ القرارات البرمجية لبنة إذا )) ثم ، والتي تتحكم في تسلسل عمليات البرنامج. تنتمي لبنة إذا )) ثم ، في فيكس كود في آر إلى فئة لبنات التحكم باللون البرتقالي وتتحكم في سير البرنامج. تتحقق اللبنة أولًا من حالتها. فإذا كانت نتيجة الشرط صوابا ، يتم تشغيل الأوامر الموجودة بداخلها، وإذا كانت نتيجة الشرط خطأ فسيتم تجاهل هذه الأوامر. تعمل لبنة إذا ( ) ثم للتحقق من الشرط مرة واحدة فقط. في حال أصبحت نتيجة الشرط خطأ أثناء تشغيل الأوامر البرمجية داخل اللبنة، سيستمر تشغيلها حتى نهاية اللبنة البرمجية. الشرط أحد أهم الخطوات في البرمجة هي الجمل الشرطية. تُعد لبنة إذا ( ) ثم من أبسط الطرق للتحقق من صحة الشروط . عندما تحتاج إلى التحقق من أكثر من شرط واحد، يمكنك استخدام المزيد من لبنات إذا ) ) ثم. وهكذا تُستخدم هذه اللبنة في العديد من الحالات مثل مقارنة القيم أو التحقق من إدخال معين أو للتحكم في الكائنات. وزارة التعليم Ministry of Education 2024-1446
كيف تعمل لبنة إذا تم
كيفية إعادة ضبط الاتجاه والانعطاف يعتبر تحديد موقع واتجاه الروبوت أثناء تحركه في ساحة اللعب أمرًا مهما للغاية، وتساعد هذه المعلومات على نقل الروبوت إلى موقع آخر إذا أردت ذلك. فعلى سبيل المثال إذا أردت الذهاب إلى مدرستك، فإنك ستتوجه إلى مدخل المنزل، وستمضي قدما وتفتح الباب وتمضي لتصل إلى رصيف الشارع، ثم ستتابع التقدم وتنعطف باتجاه مدرستك وستستمر بهذا الأمر حتى الوصول إلى المدرسة. يمكن القيام بهذا الأمر باستخدام الروبوت من خلال استخدام فئة لبنات نظام الدفع وبالاستعانة بفئة لبنات الاستشعار. يمكن العثور على هذه اللبنات في فئة لبنات نظام الدفع. إضبط زاوية المواجهة الى درجة اضبط زاوية الدوران للقيادة لـ 0 درجة تحدد لبنة اضبط زاوية المواجهة إلى ( ) درجة (set drive heading to ( ) degrees) اتجاه الروبوت إلى قيمة محددة من اختيارك. تحدد لبنة اضبط زاوية الدوران للقيادة لـ ( ) درجة (set drive rotation to ( ) degrees زاوية انعطاف الروبوت أثناء قيادته إلى قيمة محددة من اختيارك. يمكن العثور على هذه اللبنات في فئة لبنات الاستشعار باللون الأزرق الفاتح في قسم مستشعرات نظام الدفع. تحدد لبنة اتجاه المواجهة لنظام القيادة بالدرجات (drive heading in degrees اتجاه نظام قيادة الروبوت بالاستعانة بوضع الزاوية الحالي لمستشعر الجيرسكوب. إتجاه المواجهه لنظام القيادة بالدرجات على سبيل المثال، إذا كانت زاوية الروبوت 90 درجة باستخدام لبنة اتجاه المواجهة لنظام القيادة بالدرجات، فبمساعدة مستشعر الجيرسكوب سيبلغ بالاتجاه على لوحة القيادة. دوران القيادة بالدرجات معلومة تحدد لبنة دوران القيادة بالدرجات (drive rotation in degrees زاوية انعطاف نظام قيادة الروبوت عند ضبطه باستخدام مستشعر الجيرسكوب يمكنك دائما تتبع اتجاه الروبوت الافتراضي وعدد الانعطافات التي قام بها. 345 وزارة التعليم Ministry of Education 2024-1446

كيفية إعادة ضبط الاتجاه والانعطاف
يمكانك دائما تتبع الروبوت الافتراضي وعدد الانعطافات التي قام بها
346 Front Down Heading Rotation Location Eye Eye 0° 0° Object: False Object: False Color: None Color: None X: -900 mm Y: -900 mm إنشاء مربع آخر است يتجه الروبوت مستقيما بزاوية 0 درجة ولا يتم دورانه بزاوية 0 درجة. اختر ساحة لعب شبكة خريطة ، وأنشئ المقطع البرمجي أدناه وشغله. لا تنس تحديد قيم الصناديق الموجودة على يسار لبنات الموضع ( ) بالمليمتر وزاوية الموضع بالدرجات. ما نتيجة تنفيذ هذا المقطع البرمجي ؟ اضبط سرعة القيادة إلى 30 % إضبط سرعة الإنطاق إلى 30 % تحرك إلى الأمام قرار 4 إتجاه المواجهه لنظام القيادة بالدرجات تحرك إلى الأمام عدد 400 انعطف يمين لمدة 90 درجة mm إضافة تأخير زمني بين الخطوات إضبط زاوية المواجهة الى 0 درجة الانسلار 1 وزارة التعليم Ministry of Education 2024-1446
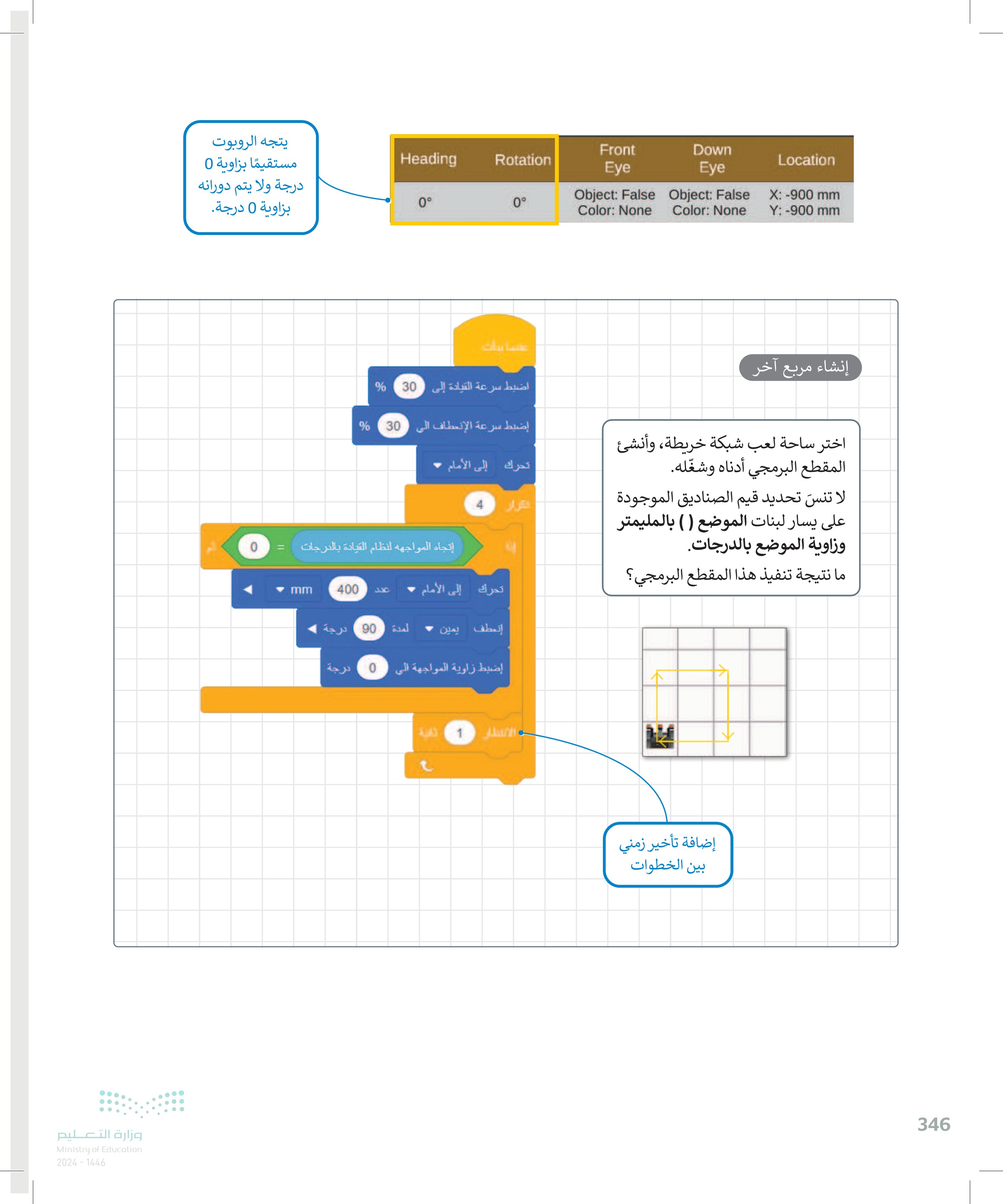
اختر ساحة لعب شبكة خريطة وأنشى المقطع البرمجي أدناه وشغله لا تنسن تحديد قيم الصناديق الموجودة على يسار لبنات الموضع () بالمليمتر وزاوية الموضع بالدرجات ما نتيجة تنفيذ هذا المقطع البرمجي؟
لنطبق معا تدريب 1 ما مستشعر الجيرسكوب؟ وكيف يمكن استخدامه للتحكم في حركة الروبوت؟ تدريب 2 صل اللبنات البرمجية بوظيفتها الصحيحة. 1 2 3 4 الموضع X دوران القيادة بالدرجات زاوية الموضع بالدرجات mm تحدد الاتجاه المواجه لنظام الدفع باستخدام وضع الزاوية الحالي لمستشعر الجيرسكوب. تحدد موضع إحداثيات X أو Y للروبوت الافتراضي بالمليمتر أو بالبوصة. تحدد الاتجاه الحالي الذي يواجهه الروبوت الافتراضي بالدرجات. إتجاه المواجهه لنظام القيادة بالدرجات تحدد زاوية انعطاف نظام الدفع عند ضبطها بواسطة مستشعر الانعطاف. 347 وزارة التعليم Ministry of Education 2024-1446
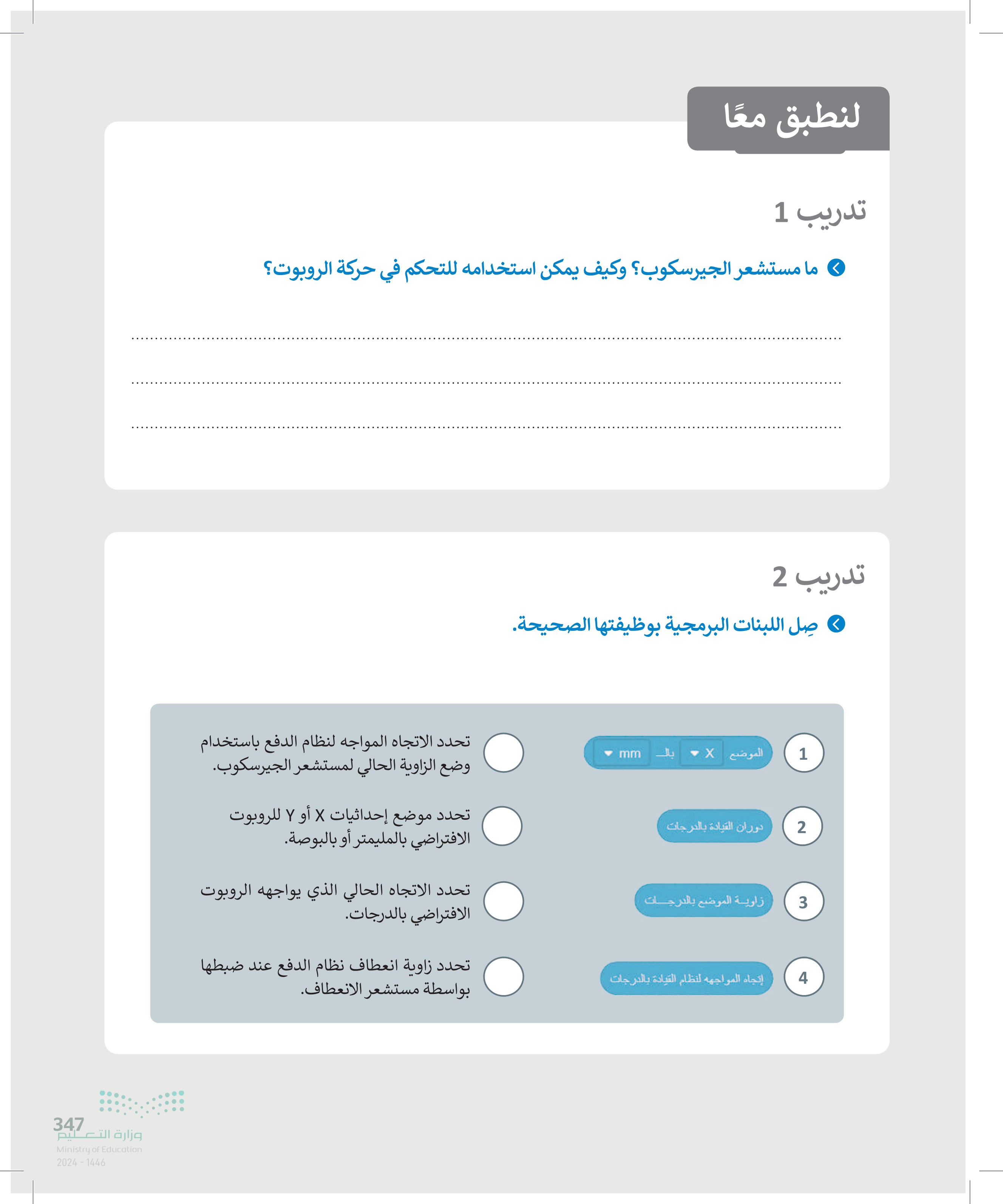
ما مستشعر الجيرسكوب؟ وكيف يمكن استخدامه للتحكم في حركة الروبوت؟

صل اللبنات البرمجية بوظيفتها الصحيحة
348 تدريب 3 أنشئ مقطعًا برمجيًا لجعل الروبوت الافتراضي يرسم مستطيلًا في ملعب فن القماش. ملاحظة : أضلاع المستطيل المتقابلة متساوية. تدريب 4 استخدم ساحة لعب شبكة خريطة وأنشئ مقطعًا برمجيًا يبدأ به الروبوت الحركة من النقطة (900- :: مليمتر و 900 - :: مليمتر، وينتهي في منتصف هذه الساحة. > استخدم لبنات الموضع ( ) بالمليمتر للحركة، وزاوية الموضع بالدرجات للانعطاف. وزارة التعليم Ministry of Education 2024-1446
استخدم ساحة لعب شبكة خريطة وأنشئ برنامجا يبدأ به الروبوت الحركة من النقطة (-900...)
أنشئ برنامجا لجعل الروبوت الافتراضي يوسم مستطيلا في ملعب فن القماش



 0
0











